Ros Trade Value Chart
Ros Trade Value Chart - The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. Trying to use the vcs command to install ros yields this error: However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. When on the step to run the examples, the c++ talker exits silently, while the python listener. I am working on ubuntu20.04lts and using ros noetic. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner. Ros2 humble hawksbill to install ros2 humble, while i'm following this : In ros1 i would source ros again, rebuild my packages and it would be done ! I have been trying to install ros 2 from binary onto windows by following these instructions. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. Ros2 humble hawksbill to install ros2 humble, while i'm following this : The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner. I have been trying to install ros 2 from binary onto windows by following these instructions. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. I am working on ubuntu20.04lts and using ros noetic. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. Trying to use the vcs command to install ros yields this error: But here in ros2 dashing even when sourcing ros2 again i still have this package in those. When on the step to run the examples, the c++ talker exits silently, while the python listener. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. However your problem appears that you. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. I am working on ubuntu20.04lts and using ros noetic. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. I have been trying to. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. When on the step to run the examples, the c++ talker exits silently, while. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. Trying to use the vcs command to install ros yields this error: I have been trying to install ros 2 from binary onto windows by following these instructions.. In ros1 i would source ros again, rebuild my packages and it would be done ! I am working on ubuntu20.04lts and using ros noetic. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. When on the step to run the examples, the c++ talker exits silently, while the. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. But when i use ros2 run ea. In ros1 i would source ros again, rebuild my packages and it would be done ! However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. When on the step to run the examples, the c++ talker exits silently, while the python listener. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. Ros2 humble hawksbill to install ros2 humble, while i'm following this. When on the step to run the examples, the c++ talker exits silently, while the python listener. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. If geographic_msgs provides a separate development package or. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. Ros2 humble hawksbill to install ros2 humble, while i'm following this : If geographic_msgs provides a separate development package or sdk, be sure it has been installed. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface.. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. I have been trying to install ros 2 from binary onto windows by following these instructions. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. I am working on ubuntu20.04lts and using ros noetic. When on the step to run the examples, the c++ talker exits silently, while the python listener. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. Ros2 humble hawksbill to install ros2 humble, while i'm following this : In ros1 i would source ros again, rebuild my packages and it would be done ! The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner.
ROS Stock Price and Chart — TSXVROS — TradingView
![[Boone] Week 14 ROS Rankings / Trade Value Chart r/fantasyfootball](https://external-preview.redd.it/boone-week-14-ros-rankings-trade-value-chart-v0-PsZOJFrY_Z_qzZ6RWdQdweAU30gwwwLJ8KjpwviFQhM.jpg?auto=webp&s=8d36cc6dab172d77a7b754c62880043a676e5760)
[Boone] Week 14 ROS Rankings / Trade Value Chart r/fantasyfootball

Week 8 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4

ROS Stock Price and Chart — TSXVROS — TradingView

Week 5 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4
.jpg?itok=6B-eL8Qt×tamp=1728488608)
Week 6 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4
Stock Market Scanning, Online Video Training for Traders and Technical Analysis of Stocks at
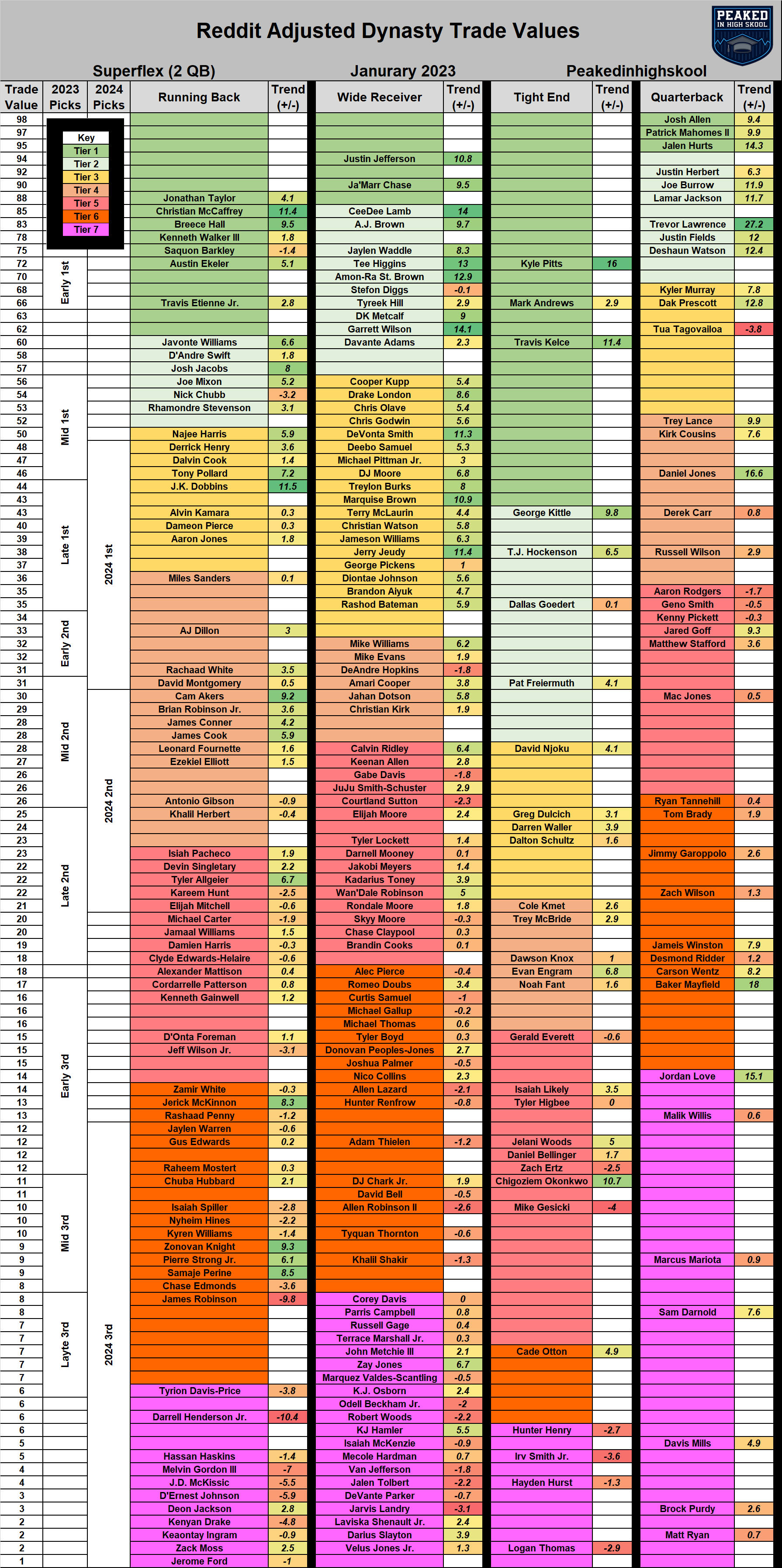
Alex PeakedInHighSkool on Twitter "The January edition of the Dynasty Superflex Trade Value

ROS Stock Price and Chart — TSXVROS — TradingView
Fantasy football Week 3 Updated trade value chart, ROS rankings Yahoo Sports
But When I Use Ros2 Run Ea Maintenance Mode Manager Maintenance Mode It Doesn't Work, I Get No Executable Found.
Trying To Use The Vcs Command To Install Ros Yields This Error:
However Your Problem Appears That You Are Trying To Convert A Transform Into A Transformstamped Which Isn't Going To Work Because They Are Not Holding The Same Data.
Related Post: